Ellipsoids3D
3D ellipsoids or spheres.
This archetype is for ellipsoids or spheres whose size is a key part of the data
(e.g. a bounding sphere).
For points whose radii are for the sake of visualization, use archetypes.Points3D instead.
If there's more instance poses than half sizes, the last ellipsoid/sphere's orientation will be repeated for the remaining poses.
Orienting and placing ellipsoids/spheres forms a separate transform that is applied prior to archetypes.InstancePoses3D and archetypes.Transform3D.
Fields fields
Required required
half_sizes:HalfSize3D
Recommended recommended
centers:PoseTranslation3Dcolors:Color
Optional optional
rotation_axis_angles:PoseRotationAxisAnglequaternions:PoseRotationQuatline_radii:Radiusfill_mode:FillModelabels:Textshow_labels:ShowLabelsclass_ids:ClassId
Can be shown in can-be-shown-in
- Spatial3DView
- Spatial2DView (if logged above active projection)
- DataframeView
API reference links api-reference-links
Example example
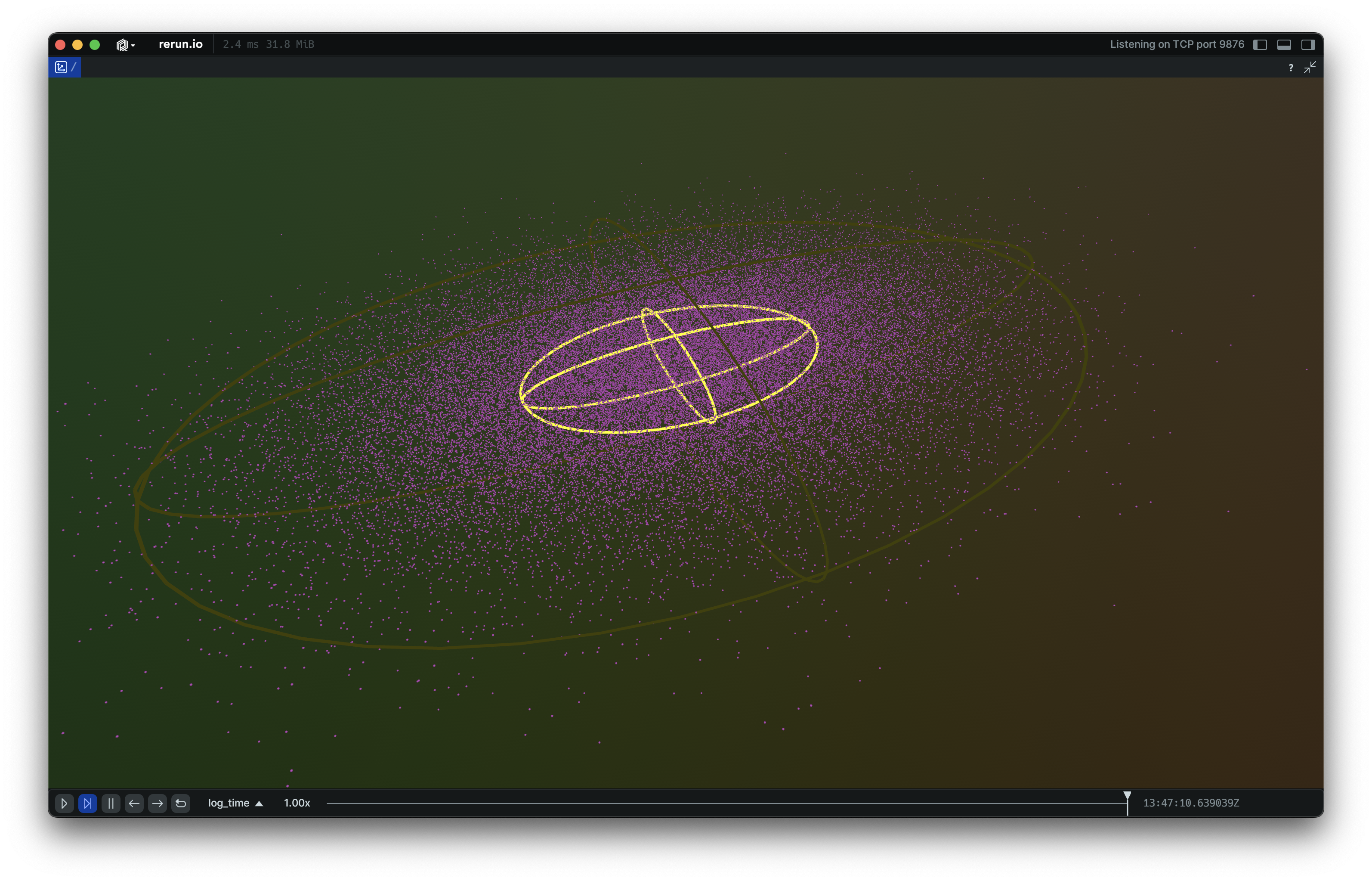
Covariance ellipsoid covariance-ellipsoid
"""Log random points and the corresponding covariance ellipsoid."""
import numpy as np
import rerun as rr
rr.init("rerun_example_ellipsoid_simple", spawn=True)
center = np.array([0, 0, 0])
sigmas = np.array([5, 3, 1])
points = np.random.randn(50_000, 3) * sigmas.reshape(1, -1)
rr.log("points", rr.Points3D(points, radii=0.02, colors=[188, 77, 185]))
rr.log(
"ellipsoid",
rr.Ellipsoids3D(
centers=[center, center],
half_sizes=[sigmas, 3 * sigmas],
colors=[[255, 255, 0], [64, 64, 0]],
),
)